×
首页
产品中心
水声通信声纳
水声数字通信机DTD33
远距离水声数字通信机DTD10
潜水员语音通信系统V1500
潜水员语音通信系统V500
潜水员语音通信及定位系统DTU3000
多普勒计程仪
水下机器人抗流悬停传感器H1000
水下机器人抗流悬停传感器H1000(嵌入式)
DeepNavi活塞式多普勒计程仪S500
DeepNavi活塞式多普勒计程仪S1000
DeepNavi大耐压活塞式多普勒计程仪S500Ti
超短基线通信定位系统
超短基线定位声纳UBD10000
超短基线定位通信声纳UBD6000
超短基线定位声纳UBD4000
超短基线定位通信声纳UBD1000
水下图像声纳
超高分辨率小目标搜探图像声纳HDY-240
水下三维搜探声纳系统3DS
水下三维搜探声纳系统3DL
水下三维搜探声纳系统3DX
Seaview高精度前视目标搜探声纳FLS800D
高精度前视目标搜探声纳FLS700P
测距声纳
水下测距声纳ES300
AUV/ROV/无人艇/潜水员等行业应用
泳池清洗机器人 自主建图/路径规划/引导回站/无线遥控技术
水下潜航器(AUV)声学应用
水下机器人(ROV)声学应用
潜水员语音、通讯和定位应用
智能港口水下防御系统应用
海上钻井平台落水人员、物体 三维立体救援、打捞应用
水下声纳生命探测仪手持声纳
行业应用实例
应用案例
合作伙伴
企业文化及荣誉
公司简介
荣誉资质
新闻资讯
技术支持
产品资料下载
软件/固件下载
加入我们
首页
产品中心
水声通信声纳
水声数字通信机DTD33
远距离水声数字通信机DTD10
潜水员语音通信系统V1500
潜水员语音通信系统V500
潜水员语音通信及定位系统DTU3000
多普勒计程仪
水下机器人抗流悬停传感器H1000
水下机器人抗流悬停传感器H1000(嵌入式)
DeepNavi活塞式多普勒计程仪S500
DeepNavi活塞式多普勒计程仪S1000
DeepNavi大耐压活塞式多普勒计程仪S500Ti
超短基线通信定位系统
超短基线定位声纳UBD10000
超短基线定位通信声纳UBD6000
超短基线定位声纳UBD4000
超短基线定位通信声纳UBD1000
水下图像声纳
超高分辨率小目标搜探图像声纳HDY-240
水下三维搜探声纳系统3DS
水下三维搜探声纳系统3DL
水下三维搜探声纳系统3DX
Seaview高精度前视目标搜探声纳FLS800D
高精度前视目标搜探声纳FLS700P
测距声纳
水下测距声纳ES300
AUV/ROV/无人艇/潜水员等行业应用
泳池清洗机器人 自主建图/路径规划/引导回站/无线遥控技术
水下潜航器(AUV)声学应用
水下机器人(ROV)声学应用
潜水员语音、通讯和定位应用
智能港口水下防御系统应用
海上钻井平台落水人员、物体 三维立体救援、打捞应用
水下声纳生命探测仪手持声纳
行业应用实例
应用案例
合作伙伴
企业文化及荣誉
公司简介
荣誉资质
新闻资讯
技术支持
产品资料下载
软件/固件下载
加入我们
首页
产品中心
水声通信声纳
水声数字通信机DTD33
远距离水声数字通信机DTD10
潜水员语音通信系统V1500
潜水员语音通信系统V500
潜水员语音通信及定位系统DTU3000
多普勒计程仪
水下机器人抗流悬停传感器H1000
水下机器人抗流悬停传感器H1000(嵌入式)
DeepNavi活塞式多普勒计程仪S500
DeepNavi活塞式多普勒计程仪S1000
DeepNavi大耐压活塞式多普勒计程仪S500Ti
超短基线通信定位系统
超短基线定位声纳UBD10000
超短基线定位通信声纳UBD6000
超短基线定位声纳UBD4000
超短基线定位通信声纳UBD1000
水下图像声纳
超高分辨率小目标搜探图像声纳HDY-240
水下三维搜探声纳系统3DS
水下三维搜探声纳系统3DL
水下三维搜探声纳系统3DX
Seaview高精度前视目标搜探声纳FLS800D
高精度前视目标搜探声纳FLS700P
测距声纳
水下测距声纳ES300
AUV/ROV/无人艇/潜水员等行业应用
泳池清洗机器人 自主建图/路径规划/引导回站/无线遥控技术
水下潜航器(AUV)声学应用
水下机器人(ROV)声学应用
潜水员语音、通讯和定位应用
智能港口水下防御系统应用
海上钻井平台落水人员、物体 三维立体救援、打捞应用
水下声纳生命探测仪手持声纳
行业应用实例
应用案例
合作伙伴
企业文化及荣誉
公司简介
荣誉资质
新闻资讯
技术支持
产品资料下载
软件/固件下载
加入我们
首页
产品中心
水声通信声纳
水声数字通信机DTD33
远距离水声数字通信机DTD10
潜水员语音通信系统V1500
潜水员语音通信系统V500
潜水员语音通信及定位系统DTU3000
多普勒计程仪
水下机器人抗流悬停传感器H1000
水下机器人抗流悬停传感器H1000(嵌入式)
DeepNavi活塞式多普勒计程仪S500
DeepNavi活塞式多普勒计程仪S1000
DeepNavi大耐压活塞式多普勒计程仪S500Ti
超短基线通信定位系统
超短基线定位声纳UBD10000
超短基线定位通信声纳UBD6000
超短基线定位声纳UBD4000
超短基线定位通信声纳UBD1000
水下图像声纳
超高分辨率小目标搜探图像声纳HDY-240
水下三维搜探声纳系统3DS
水下三维搜探声纳系统3DL
水下三维搜探声纳系统3DX
Seaview高精度前视目标搜探声纳FLS800D
高精度前视目标搜探声纳FLS700P
测距声纳
水下测距声纳ES300
AUV/ROV/无人艇/潜水员等行业应用
泳池清洗机器人 自主建图/路径规划/引导回站/无线遥控技术
水下潜航器(AUV)声学应用
水下机器人(ROV)声学应用
潜水员语音、通讯和定位应用
智能港口水下防御系统应用
海上钻井平台落水人员、物体 三维立体救援、打捞应用
水下声纳生命探测仪手持声纳
行业应用实例
应用案例
合作伙伴
企业文化及荣誉
公司简介
荣誉资质
新闻资讯
技术支持
产品资料下载
软件/固件下载
加入我们
查看详情 >
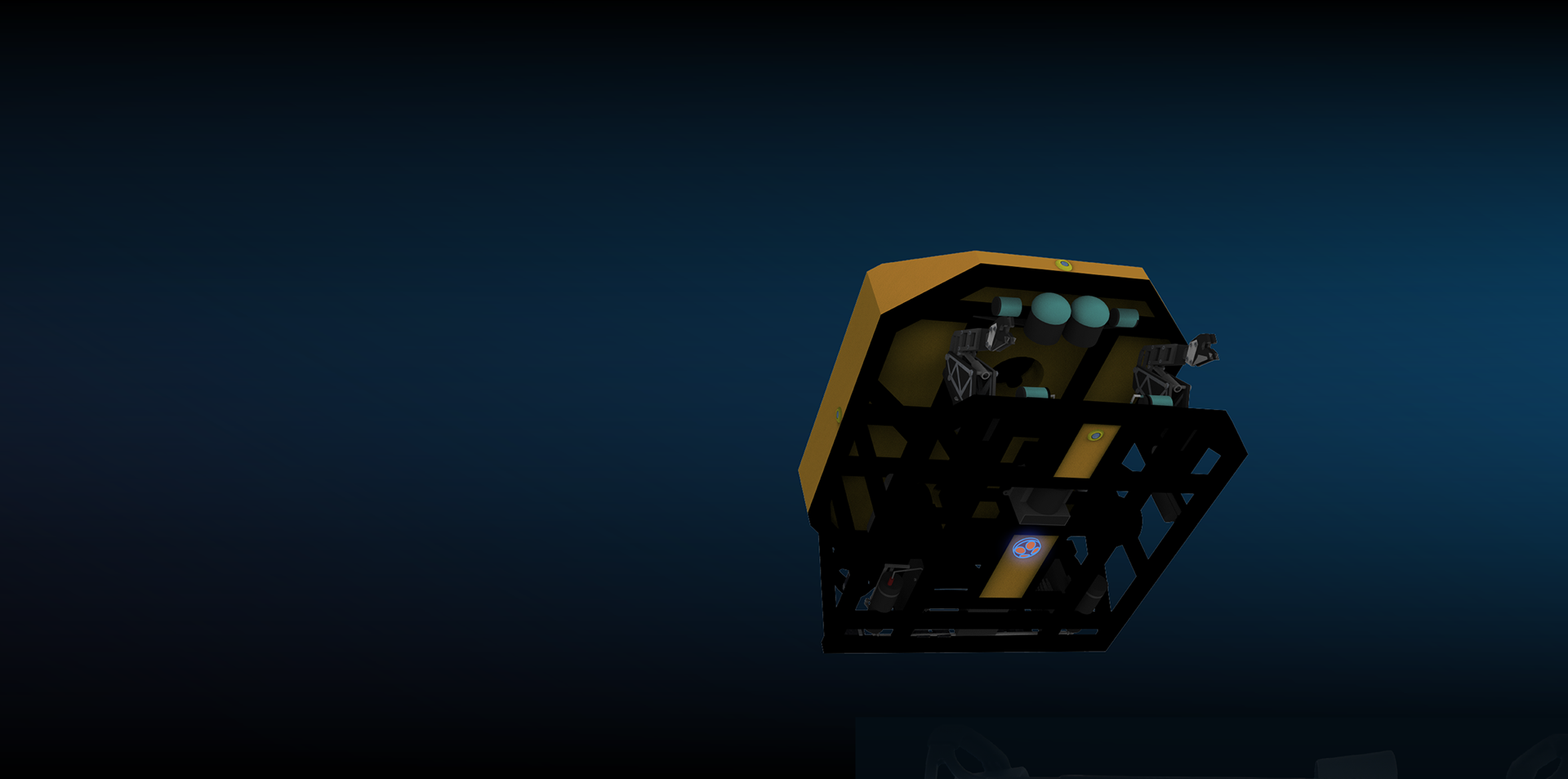
DeepNavi
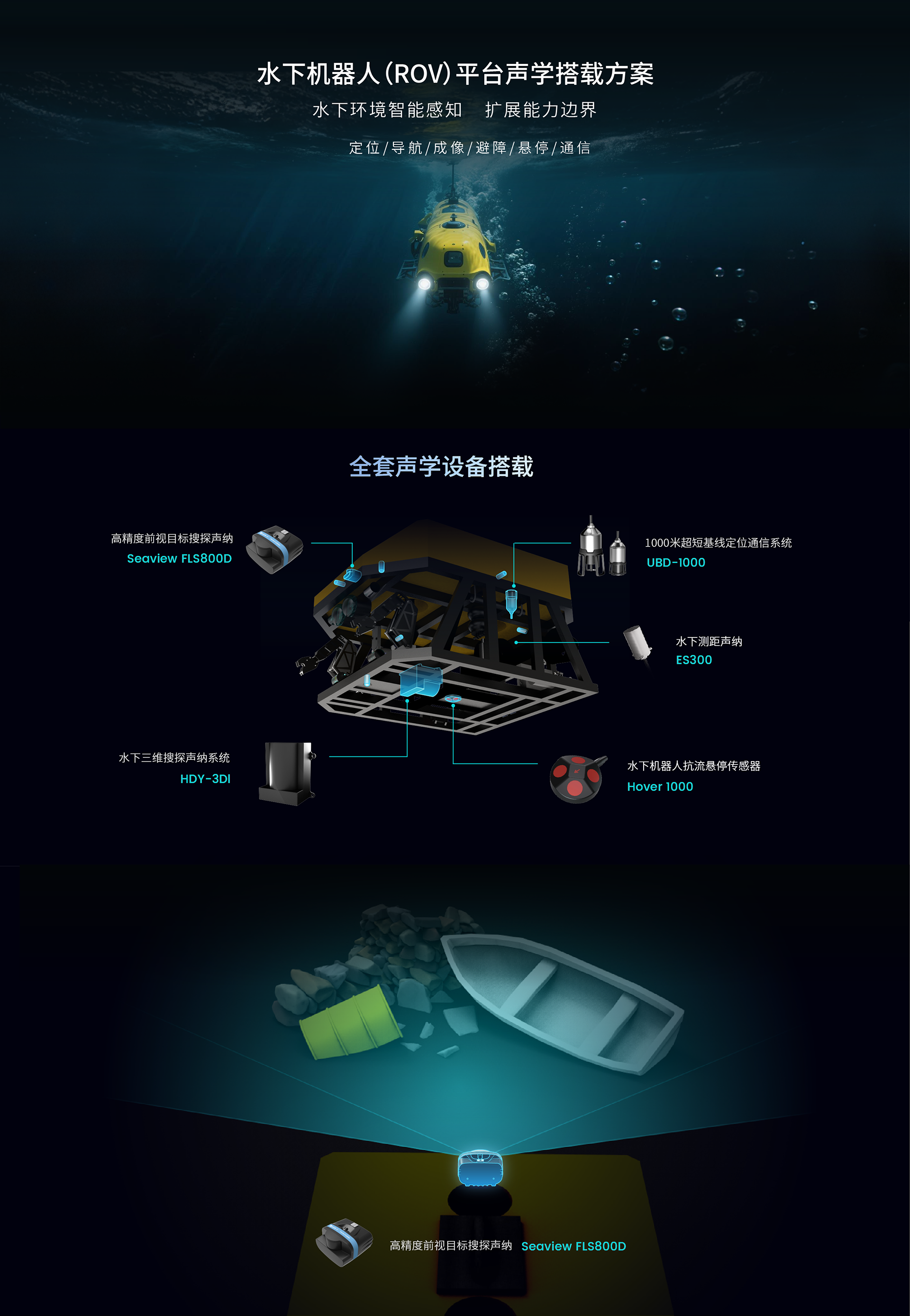
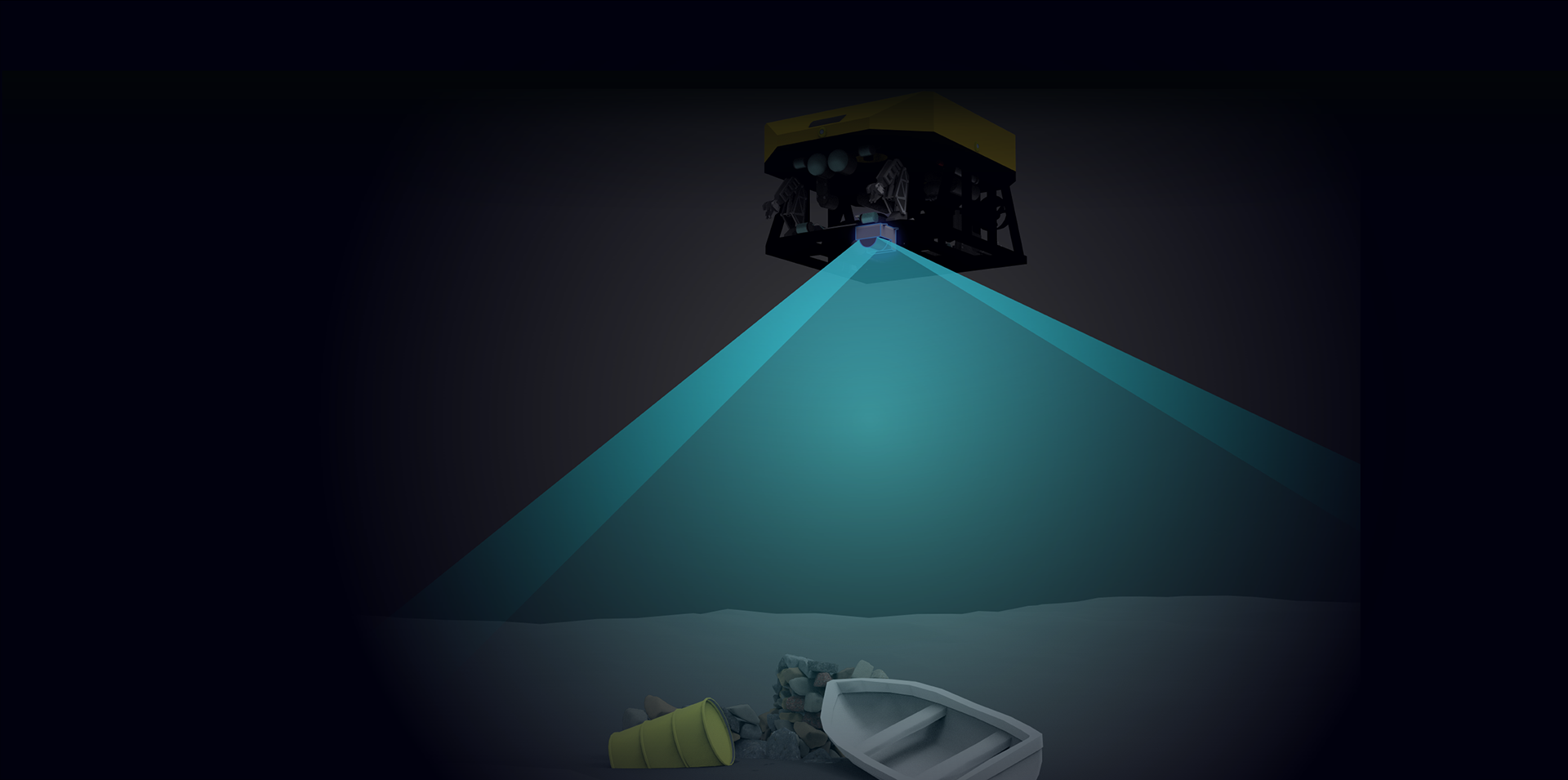
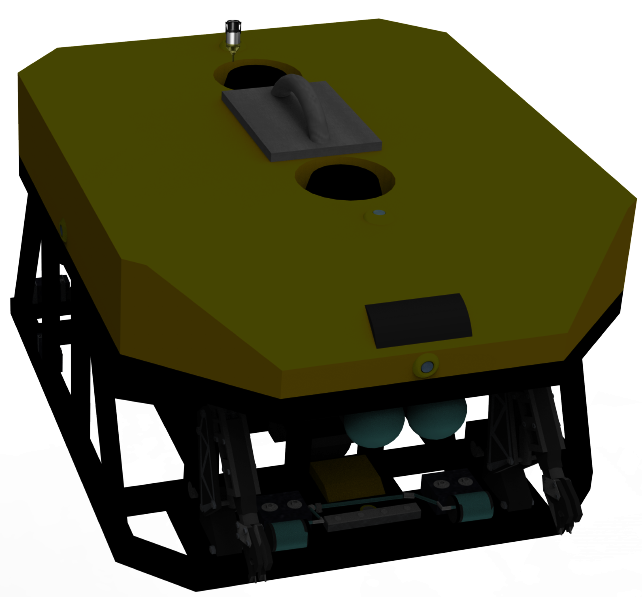
水下机器人(ROV)平台声学搭载方案
水下环境智能感知 扩展能力边界
定位/导航/成像/避障/悬停/通信
高精度前视目标搜探声纳
Seaview FLS800D
水下三维搜探声纳系统
HDY-3DL
1000米超短基线定位通信系统
UBD-1000
水下测距声纳
ES300
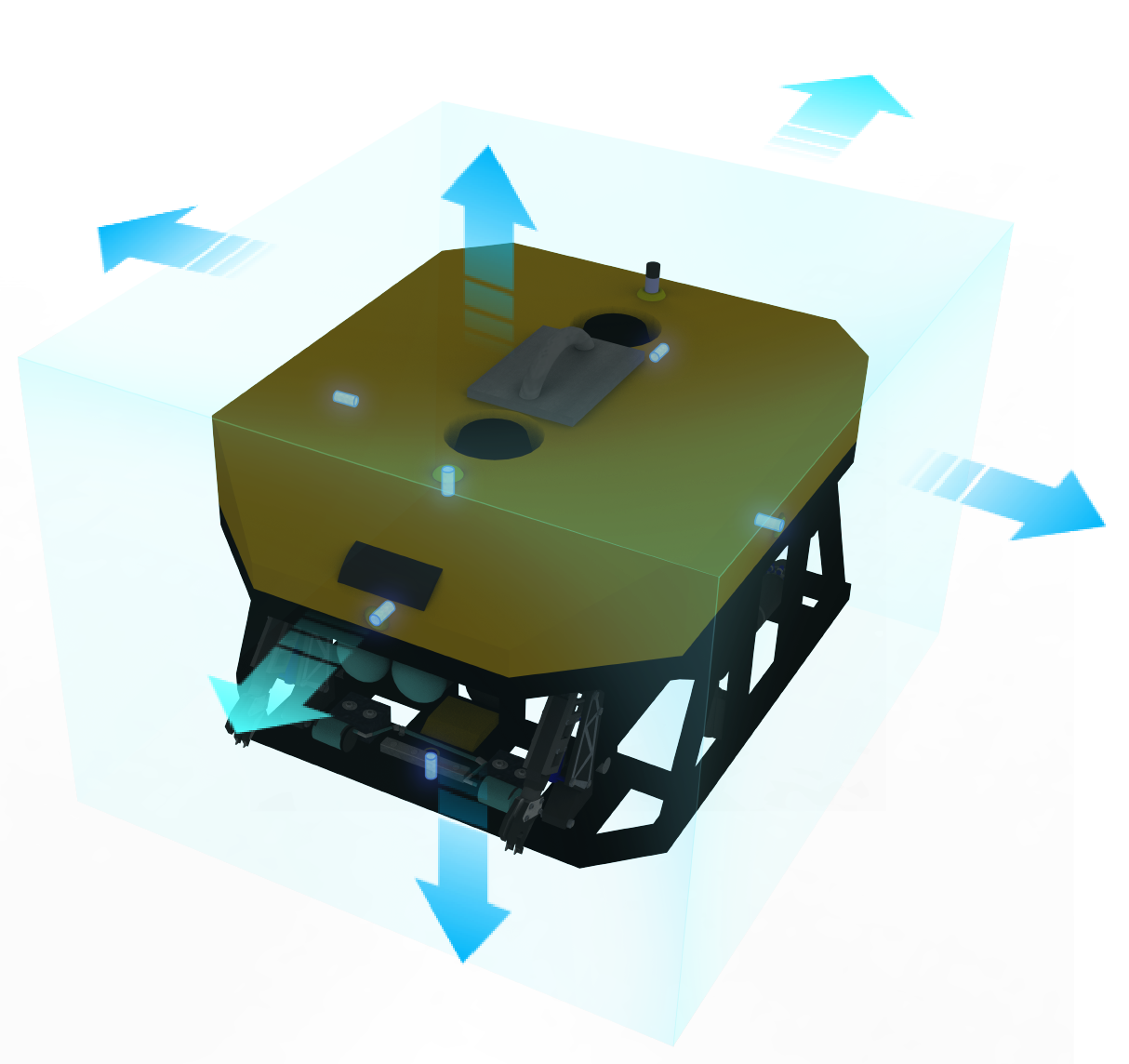
水下机器人抗流悬停传感器
Hover 1000
高精度前视目标搜探声纳
Seaview FLS800D
打开水下新“视界”
为水下机器人(ROV)专门优化,体积小、重量轻,高度集成。满足前视目标搜探与避碰需求,轻松实现远距离探测和近距离识别。具备目标自动辨识、追踪能力。
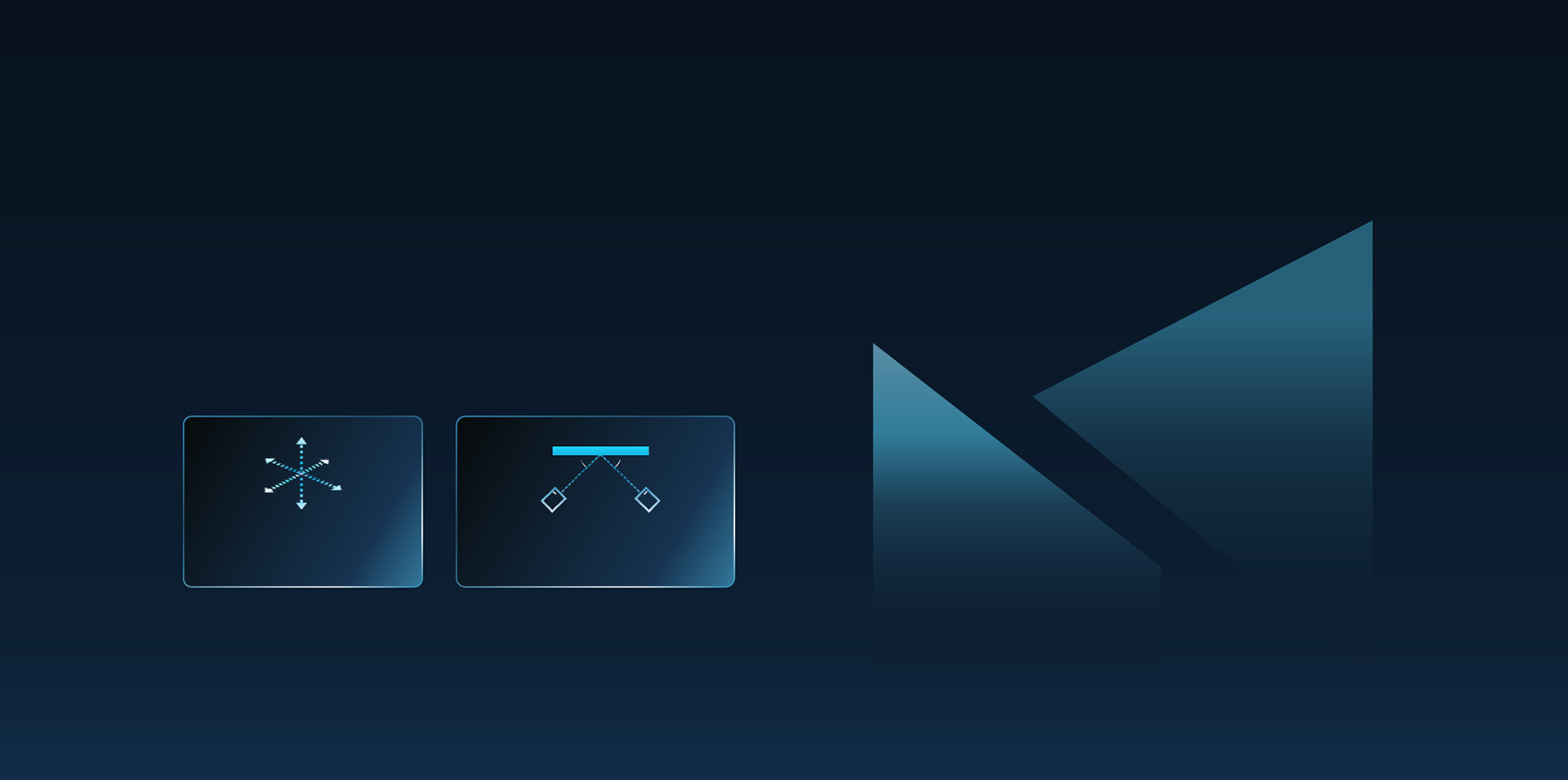
超大探测范围
极小探测盲区
应用案例
水下目标搜探
国产第三代前视目标搜探声纳FLS800D可清晰识别水下人体目标,助力应急救援提高搜救效率
水下施工监控
配合海底电缆固定施工,确认电缆位置及压缆连锁水泥位置
智慧渔业养殖
试验分别对草鱼、鲤鱼和鲟鱼进行探测成像测试,全面评估该设备在不同鱼种条件下的探测性能
水下三维搜探声纳系统
HDY-3DL
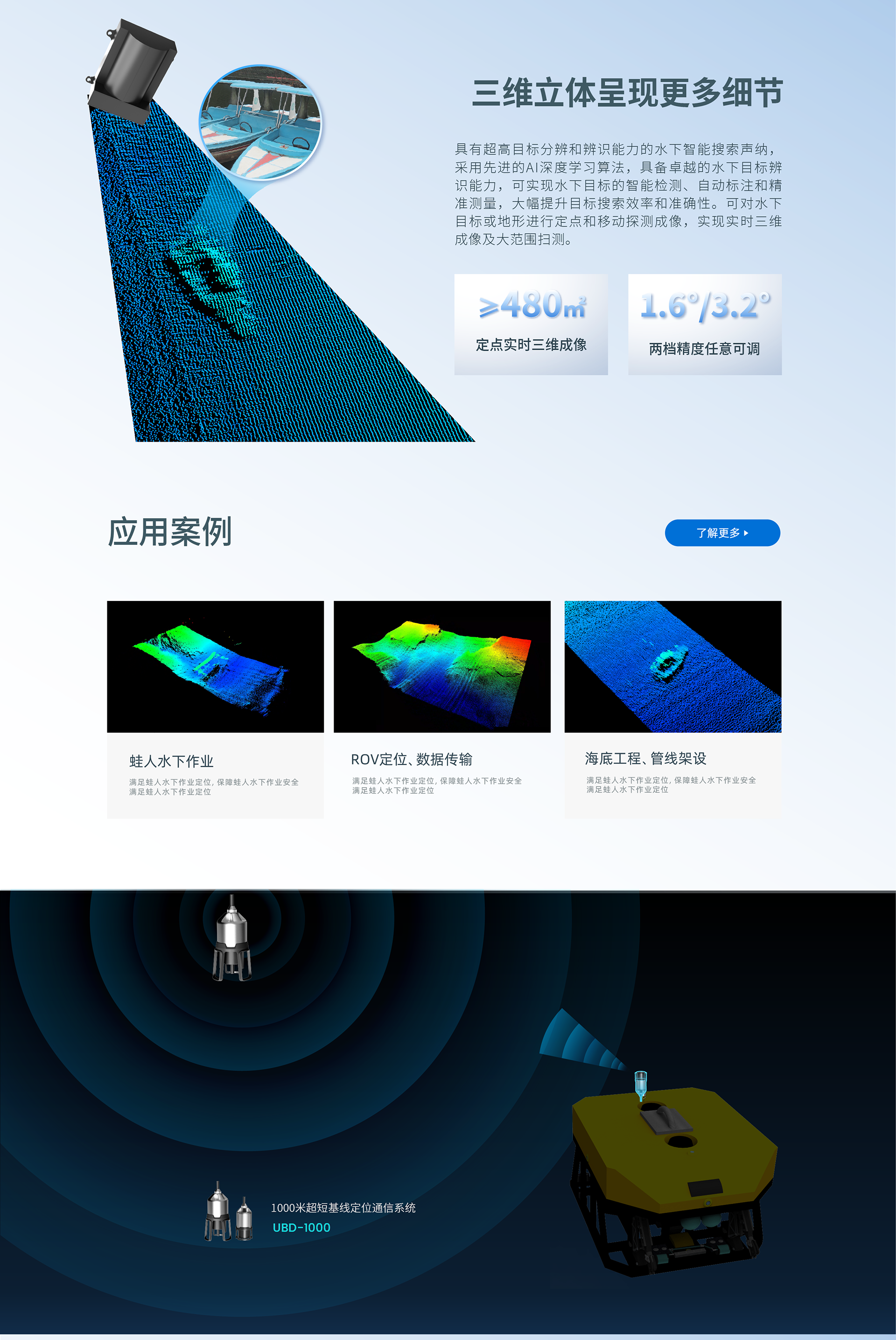
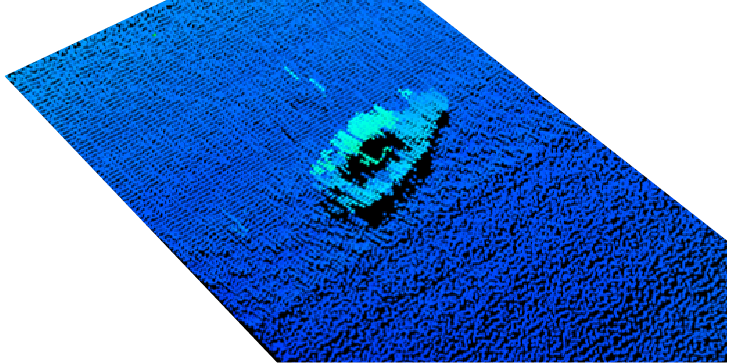
三维立体呈现更多细节
具有超高目标分辨和辨识能力的水下智能搜索声纳,采用先进的AI深度学习算法,具备卓越的水下目标辨识能力,可实现水下目标的智能检测、自动标注和精准测量,大幅提升目标搜索效率和准确性。可对水下目标或地形进行定点和移动探测成像,实现实时三维成像及大范围扫测。
定点实时三维成像
两档精度任意可调
应用案例
水下U形结构
满足蛙人水下作业定位,保障蛙人水下作业安全满足蛙人水下作业定位
水下地形
满足蛙人水下作业定位,保障蛙人水下作业安全满足蛙人水下作业定位
水下沉船
满足蛙人水下作业定位,保障蛙人水下作业安全满足蛙人水下作业定位
水下三维搜探声纳系统
HDY-3DL
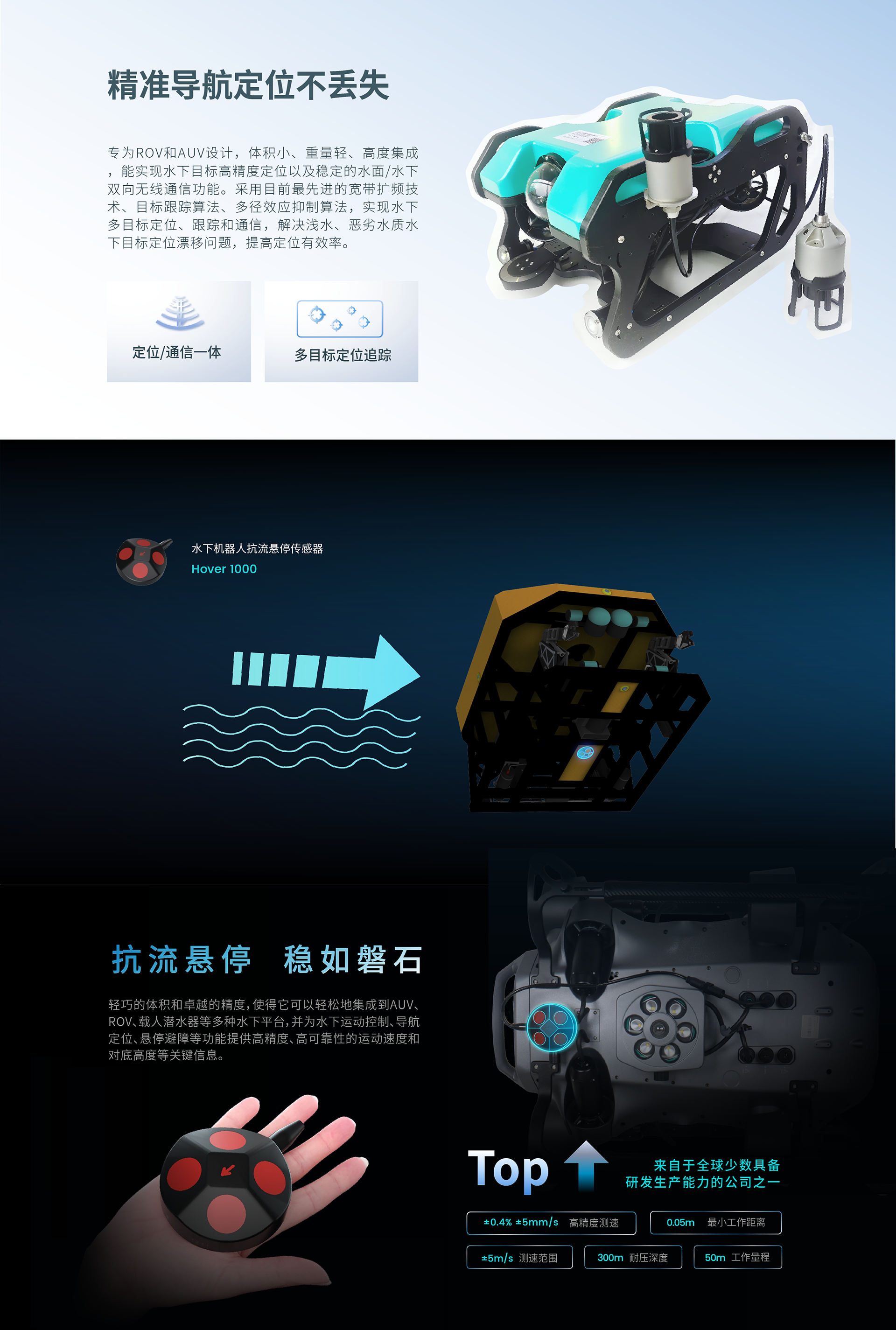
精准导航定位不丢失
专为ROV和AUV设计,体积小、重量轻、高度集成,能实现水下目标高精度定位以及稳定的水面/水下双向无线通信功能。采用目前最先进的宽带扩频技术、目标跟踪算法、多径效应抑制算法,实现水下多目标定位、跟踪和通信,解决浅水、恶劣水质水下目标定位漂移问题,提高定位有效率。
定位/通信一体
多目标定位追踪
水下三维搜探声纳系统
HDY-3DL
轻巧的体积和卓越的精度,使得它可以轻松地集成到AUV、ROV、载人潜水器等多种水下平台,并为水下运动控制、导航定位、悬停避障等功能提供高精度、高可靠性的运动速度和对底高度等关键信息。
来自于全球少数具备
研发生产能力的公司之一
±0.4% ±5mm/s
高精度测速
0.05m
最小工作距离
±5m/s
测速范围
300m
耐压深度
45m
工作量程
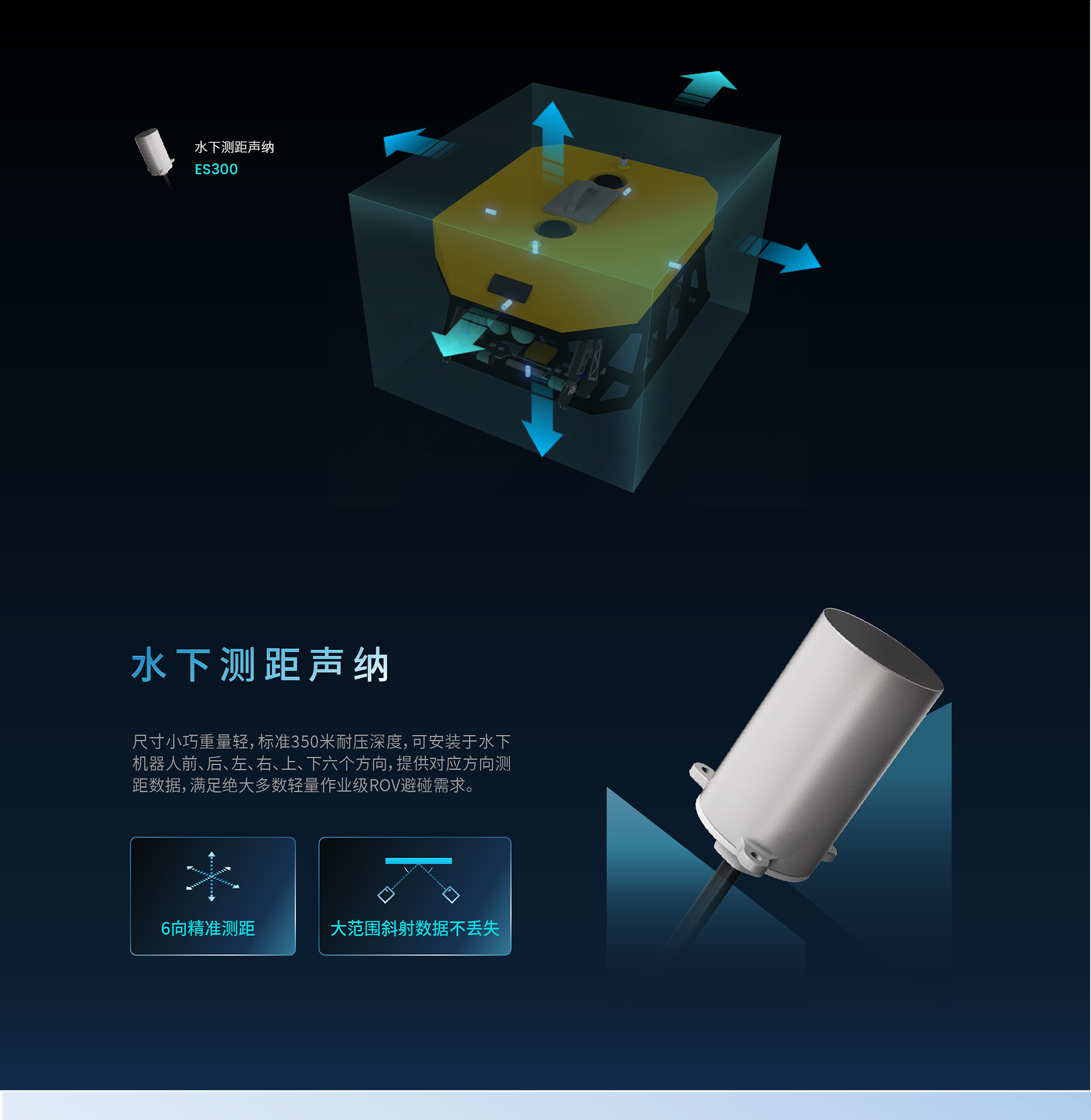
水下测距声纳
ES300
尺寸小巧重量轻,标准350米耐压深度,可安装于水下机器人前、后、左、右、上、下六个方向,提供对应方向测距数据,满足绝大多数轻量作业级ROV避碰需求。
定位/通信一体
多目标定位追踪
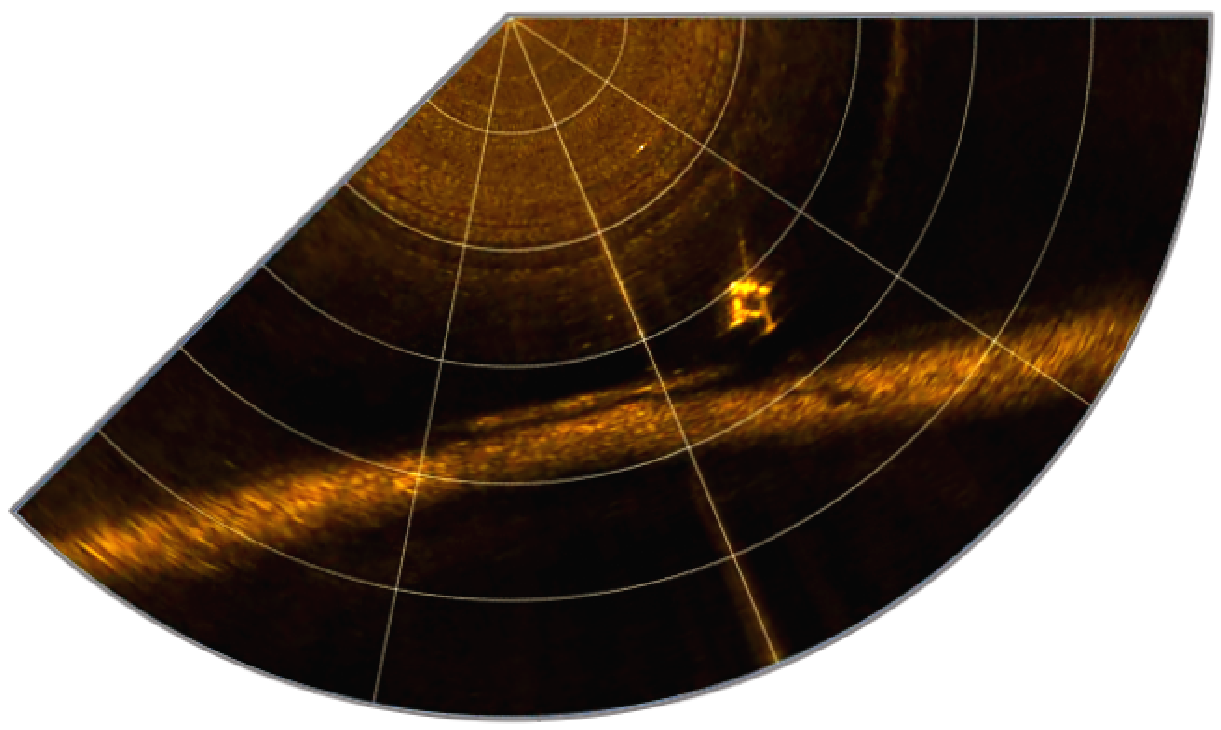
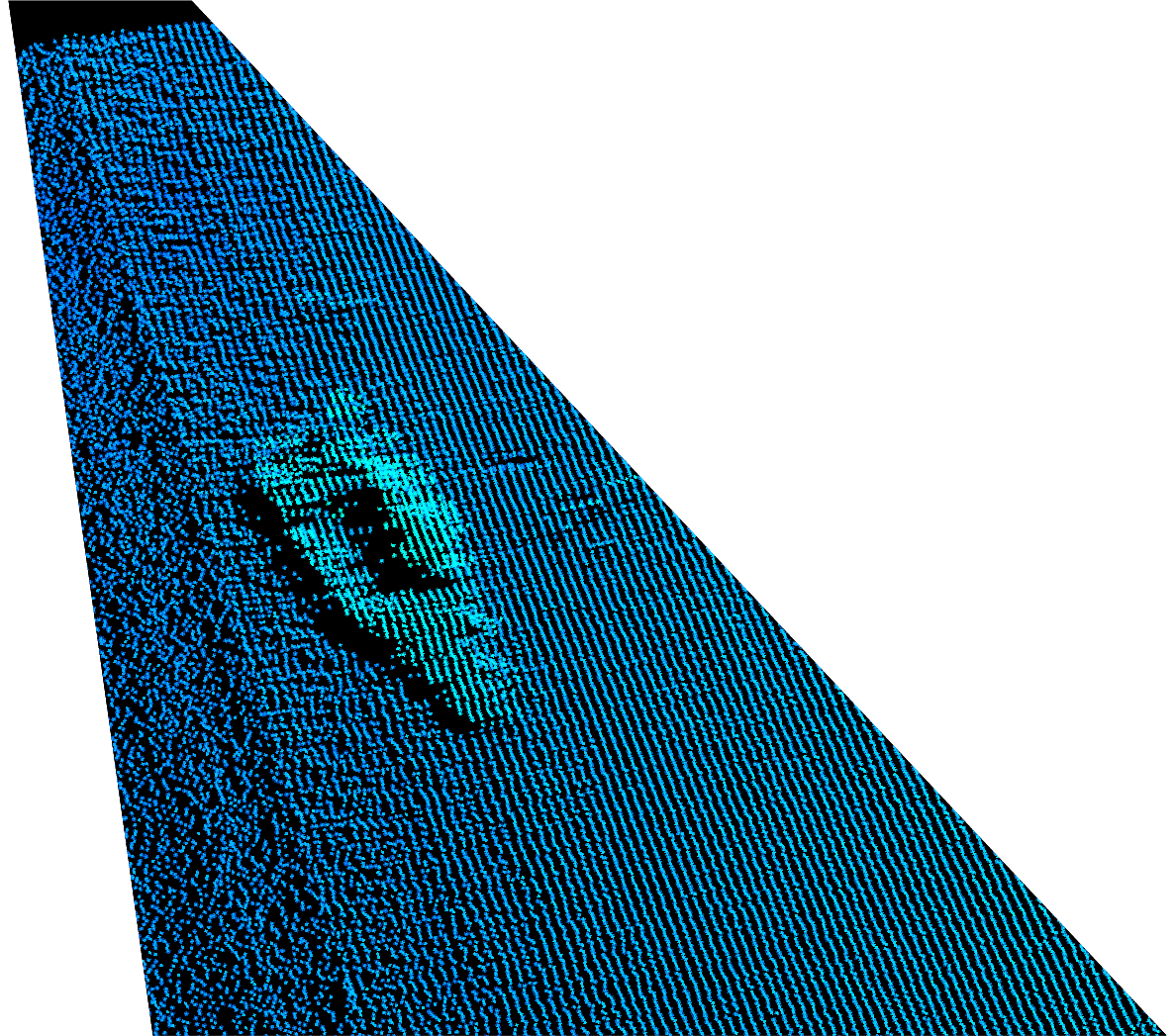
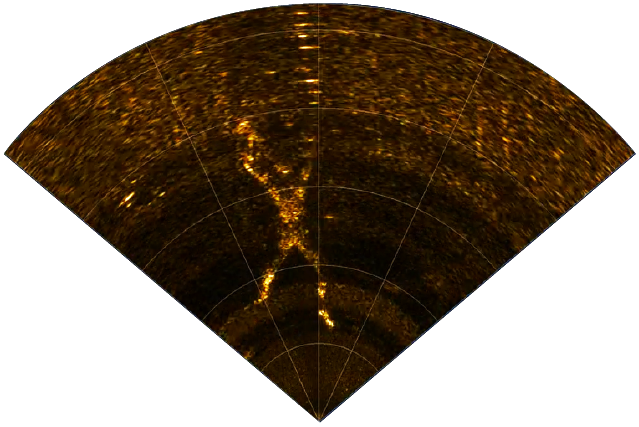
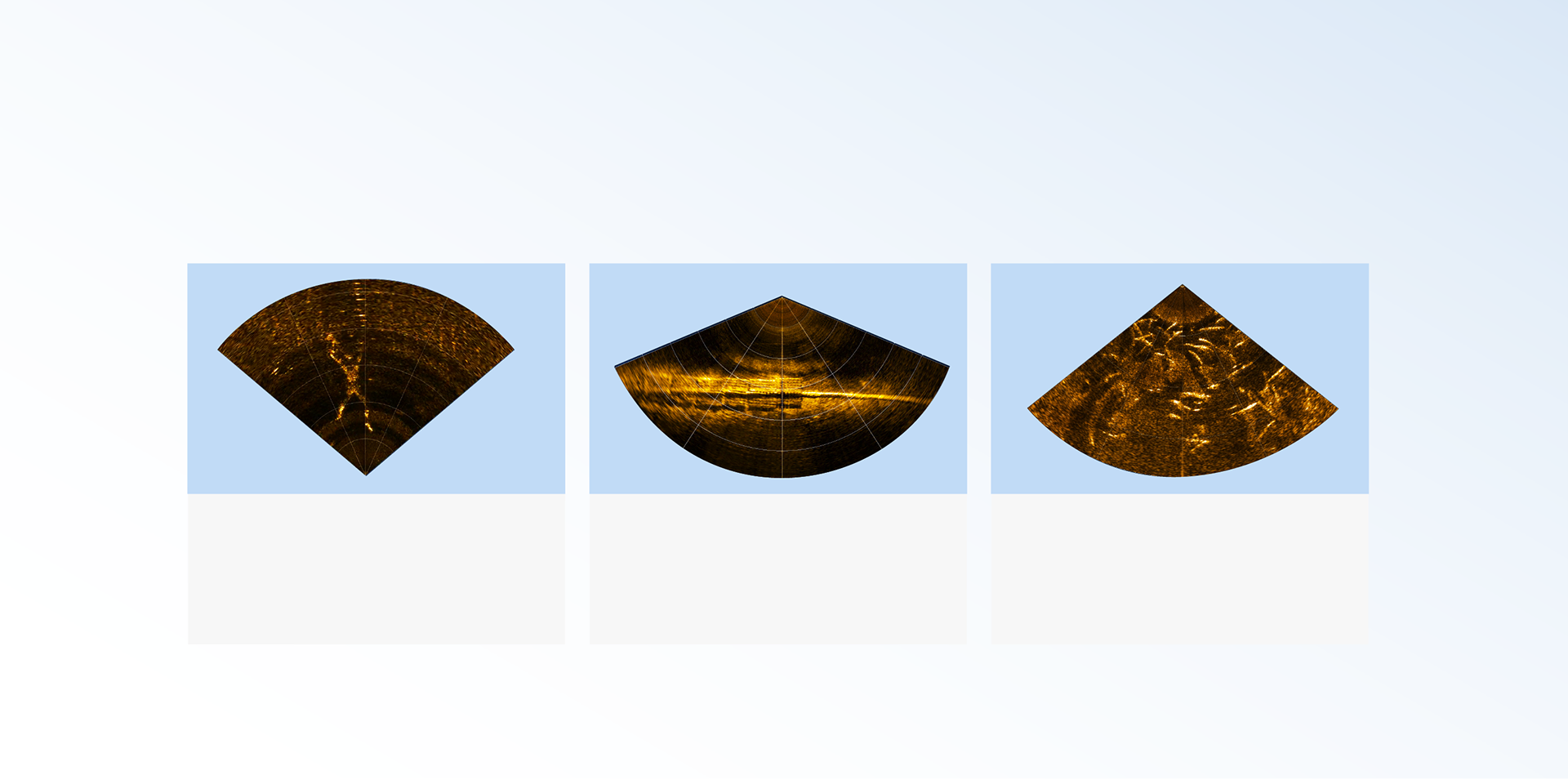
在水质浑浊、结构复杂的环境中进行目标搜索或人体探测,针对常规静态目标或动态目标均有非常优秀的成像及辨识能力。
水底沉船
水底人体目标
工况场景
水流、洋流对ROV影响较强,需求ROV在水中固定空间位置悬停;ROV产生荷载、姿态改变后需要在固定坐标位置悬停或按照预定路线移动;ROV需要维持某种特定姿态或角度进行悬停或移动。
配置清单
功能说明
FLS800D
高精度前视目标搜探声纳
提供ROV正前方声呐图像(特别是能见度低的情况下),同时进行正前方避障识别
ES300
水下测距声纳
提供前、后、左、右、上、下避碰预警数据
超短基线定位通信声纳
UBD1000
定位ROV位置信息及目标相对位置信息,提供声学通信通道
水下机器人抗流悬停传感器
H1000
提供机器人悬停稳定控制数据
日 常
巡 检
结 构
检 测
异 物
搜 索
地 形
测 绘
损 害
评 估
其他三维图像需求
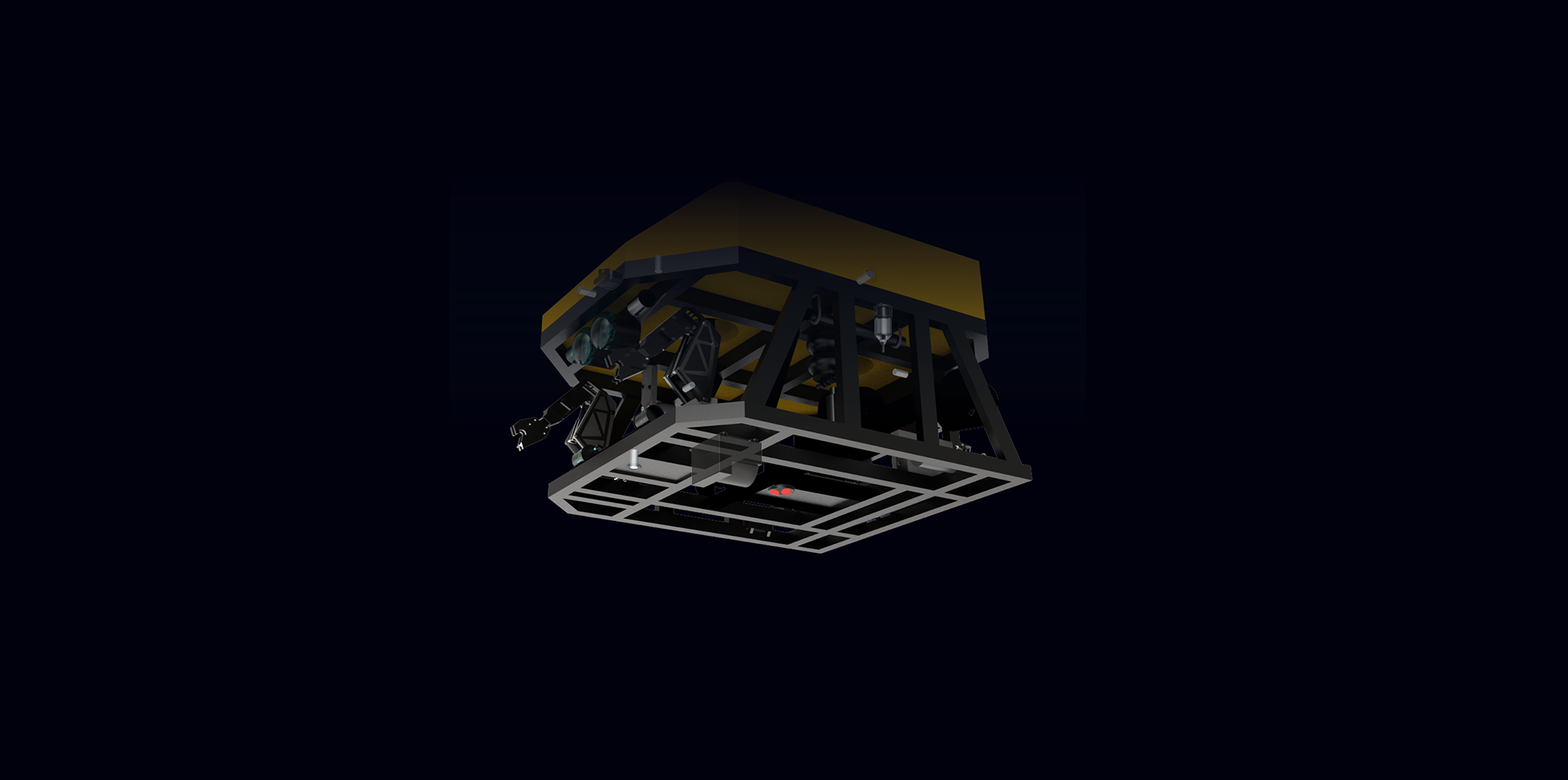
ROV在水下作业中,除了需要抵抗来自6个方向的水流,还需要在各类作业工况下长时间保持稳定且精准的悬停,例如机械手夹取物体、携带挂载物体、姿态改变等。同时需要通过对底高度等信息,结合惯导精确导航至作业坐标。
工况场景
水流、洋流对ROV影响较强,但需要ROV在水中稳定且精准的悬停;ROV产生荷载、姿态改变后仍需在固定坐标位置悬停或按照预定路线移动。
配置清单
功能说明
FLS800D
高精度前视目标搜探声纳
提供ROV正前方声呐图像(特别是能见度低的情况下),同时进行正前方避障识别
ES300
水下测距声纳
提供前、后、左、右、上、下避碰预警数据
超短基线定位通信声纳
UBD1000
定位ROV位置信息及目标相对位置信息,提供声学通信通道
水下机器人抗流悬停传感器
H1000
提供机器人悬停稳定控制数据
水 下
打 捞
水 下
焊 接
水下结构
施工
水 下
考 古
水下特种作业
其他荷载作业
横滚带角度状态悬停稳定
俯仰带角度状态悬停稳定
荷载作业状态悬停稳定
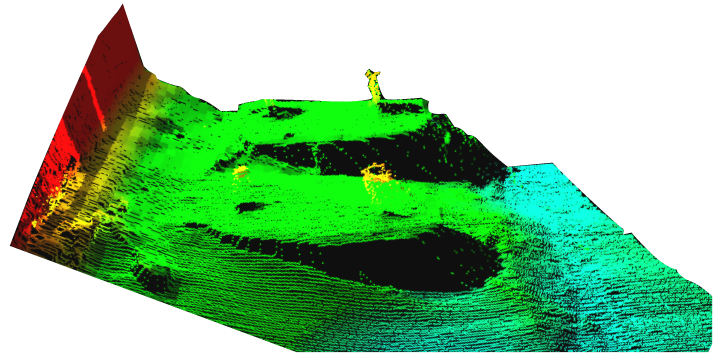
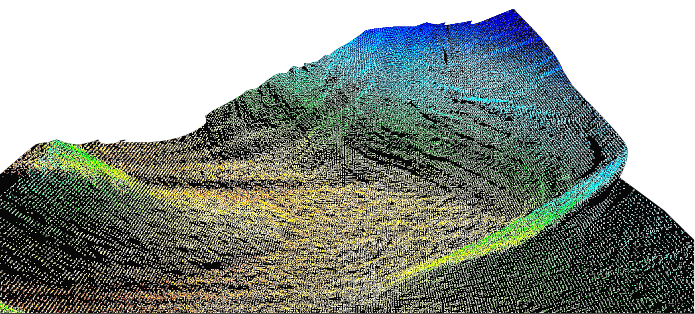
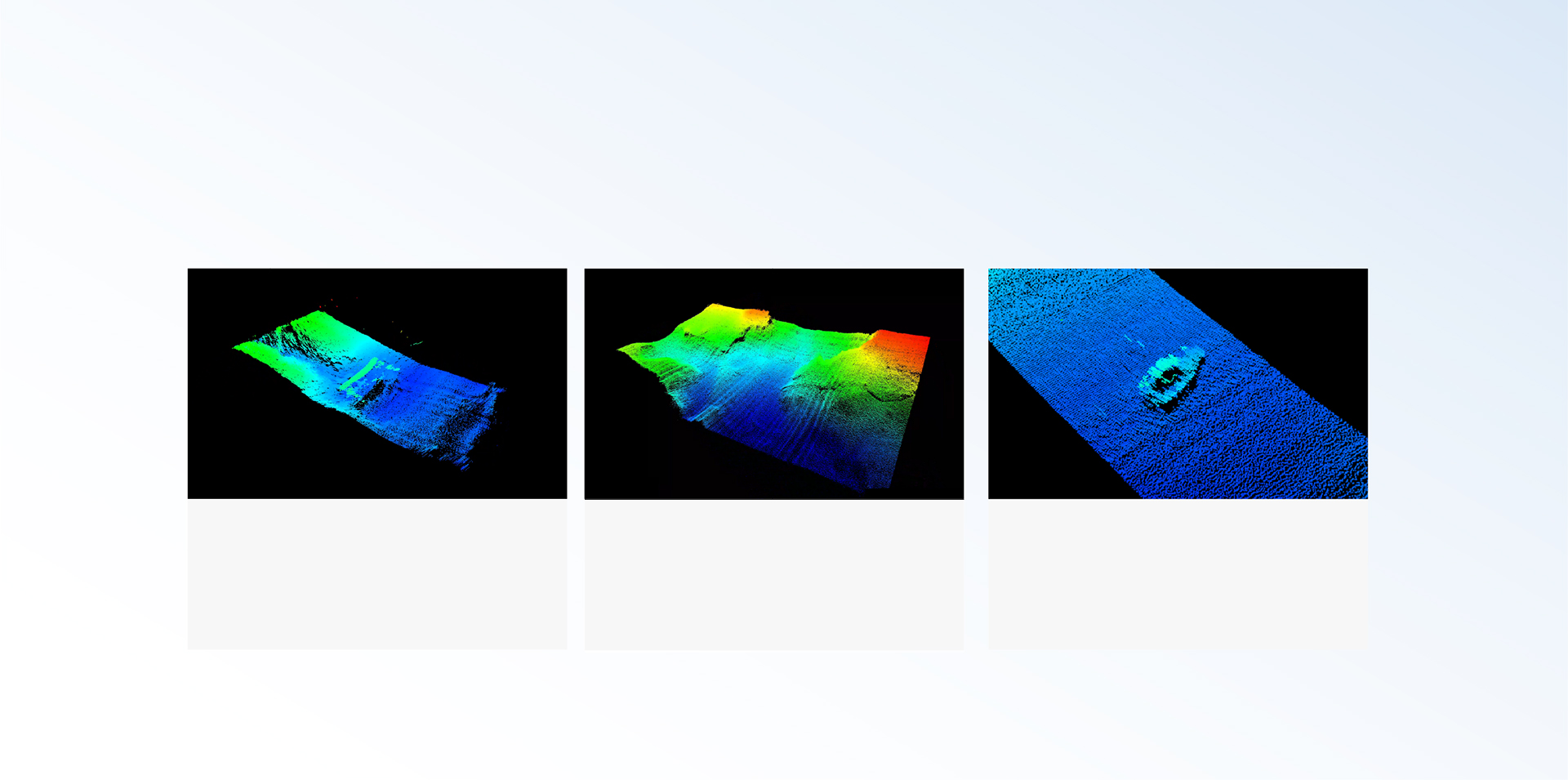
在水质浑浊、结构目标或环境复杂、深度较深、且对图像精度和完整度有一定要求的前提下,ROV是最佳选择。能够稳定悬停的ROV比潜水员获取图像的质量更高,相比水面船只,ROV获取图像的角度更多,细节更丰富,同时也更完整。
某跨海大桥桥墩海床固定基座扫测图像
某水库地形扫测图像
工况场景
可在深度≤300米范围内:
向下方≤50米范围内寻找小轿车大小或同等大小目标
向下方≤10米范围内寻找人体大小或同等大小目标
配置清单
功能说明
FLS800D
高精度前视目标搜探声纳
提供ROV正前方声呐图像(特别是能见度低的情况下),同时进行正前方避障识别
ES300
水下测距声纳
提供前、后、左、右、上、下避碰预警数据
超短基线定位通信声纳
UBD1000
定位ROV位置信息及目标相对位置信息,提供声学通信通道
水下机器人抗流悬停传感器
H1000
提供机器人悬停稳定控制数据
日 常
巡 检
结 构
检 测
异 物
搜 索
地 形
测 绘
损 害
评 估
其他三维图像需求
联系电话:400-671-4130 (周一至周日:9:00-21:00)
联系邮箱:marketing@hdyocean.com
视频号
抖音号
公众号
企业微信(杨)